
Keine Bearbeitungszusammenfassung |
Keine Bearbeitungszusammenfassung |
||
| Zeile 1: | Zeile 1: | ||
{{#css:GPN12:Stylesheet}} | {{#css:GPN12:Stylesheet}} | ||
= Kinect | = Kinect Projektor Hacken = | ||
In diesem Projekt soll es darum gehen, was man alles mit einer Kinect und einem Projektor anstellen kann. Mit der Kinect können beliebige Flächen oder Körper in 3D erfasst werden und mit dem Projektor beliebig eingefärbt werden. | In diesem Projekt soll es darum gehen, was man alles mit einer Kinect und einem Projektor anstellen kann. Mit der Kinect können beliebige Flächen oder Körper in 3D erfasst werden und mit dem Projektor beliebig eingefärbt werden. | ||
Neben den technischen Herausforderungen würde ich gerne auch in die künsterlische Richtung gehen und schon während der GPN interaktive Kunstinstallationen aufbauen. | Neben den technischen Herausforderungen würde ich gerne auch in die künsterlische Richtung gehen und schon während der GPN interaktive Kunstinstallationen aufbauen. | ||
| Zeile 9: | Zeile 9: | ||
== Riesentouchpad aus Beamer und Kinect == | == Riesentouchpad aus Beamer und Kinect == | ||
Mit dem Beamer könnte man eine Tafel oder eine Wand zu einem großen Touchscreen umbauen. Wenn man ein Whiteboard als Hintergrund nehmen würde, könnte man sogar darauf malen und darüber z.B. mit einem Spiel interagieren. Ein Beispiel wäre ein Towerdefense: [http://www.kickstarter.com/projects/1773873912/doodle-defense] (ist sogar schon OpenSource) | |||
== 3D Projektionen == | |||
Hier geht es eher darum, Menschen oder beliebige Objekte als Projektionflächen einzusetzen. Mit dem Skelett-Tracker der Kinect könnte man jemandem ein Smiley auf den Bauch malen oder etwas in diese Richtung: [http://vimeo.com/18713117] | |||
Mit dem | |||
Damit auf der GPN schnell losgehackt werden kann, habe ich schon mal einen Prototypen [https://github.com/NikolasE/Touchscreen] geschrieben und ein paar Bilder gemacht: | |||
<gallery widths=200px> | <gallery widths=200px> | ||
| Zeile 35: | Zeile 28: | ||
Auf den ersten beiden Bildern wird alles gefärbt, was sich vor der Wand befindet. Beim Farbverlauf wurde die Entfernung zur Wand auf eine Farbskala übertragen und jeder Punkt mit seiner entsprechenden Farbe angestrahlt. Für das letzte Bild hat einer unserer Roboter (ein PR2 von Willow Garage) Model gestanden. Hier hängt die Farbe vom Abstand zum Fußboden ab. | Auf den ersten beiden Bildern wird alles gefärbt, was sich vor der Wand befindet. Beim Farbverlauf wurde die Entfernung zur Wand auf eine Farbskala übertragen und jeder Punkt mit seiner entsprechenden Farbe angestrahlt. Für das letzte Bild hat einer unserer Roboter (ein PR2 von Willow Garage) Model gestanden. Hier hängt die Farbe vom Abstand zum Fußboden ab. | ||
Für die technische Umsetzung (Kalibrierung, Gestenerkennung) gibt's noch eine eigene Seite: [[GPN12:KinectTech]] | |||
== Wer wird gesucht? == | |||
- Alle, die sich für Bildverarbeitung interessieren und wissen wollen, was man alles mit einer Kamera anstellen kann. (für die Diskussion der technischen Dateils: [[GPN12:KinectTech]]) | |||
- Alle, die sich gerne künstlerisch austoben wollen, Ideen für ein Spiel oder eine Installation haben | |||
- Alle, die mal eine Demo ausprobieren wollen um sie danach in den höchsten Tönen zu loben | |||
- Alle, die sich mit Processing, OpenFrameworks und ähnlichen Techniken auskennen | |||
- Alle anderen, die gerne mal mit der Kinect spielen wollen | |||
Der Code soll natürlich openSource sein und möglichst einfach zu benutzen sein (wenig Abhängigkeiten, möglichst auch unter Windows), damit er nicht nach der GPN einfach verschwindet. | |||
Ich würde mich sehr freuen, wenn sich ein paar Leute zum Hacken und Spielen finden würden :) | |||
--[[Benutzer:Nikolas|Nikolas]] 21:47, 8. Apr. 2012 (CEST) | |||
{{Navigationsleiste GPN12}} | {{Navigationsleiste GPN12}} | ||
Version vom 8. April 2012, 20:47 Uhr
Kinect Projektor Hacken
In diesem Projekt soll es darum gehen, was man alles mit einer Kinect und einem Projektor anstellen kann. Mit der Kinect können beliebige Flächen oder Körper in 3D erfasst werden und mit dem Projektor beliebig eingefärbt werden. Neben den technischen Herausforderungen würde ich gerne auch in die künsterlische Richtung gehen und schon während der GPN interaktive Kunstinstallationen aufbauen.
Riesentouchpad aus Beamer und Kinect
Mit dem Beamer könnte man eine Tafel oder eine Wand zu einem großen Touchscreen umbauen. Wenn man ein Whiteboard als Hintergrund nehmen würde, könnte man sogar darauf malen und darüber z.B. mit einem Spiel interagieren. Ein Beispiel wäre ein Towerdefense: [1] (ist sogar schon OpenSource)
3D Projektionen
Hier geht es eher darum, Menschen oder beliebige Objekte als Projektionflächen einzusetzen. Mit dem Skelett-Tracker der Kinect könnte man jemandem ein Smiley auf den Bauch malen oder etwas in diese Richtung: [2]
Damit auf der GPN schnell losgehackt werden kann, habe ich schon mal einen Prototypen [3] geschrieben und ein paar Bilder gemacht:

Blatt Papier

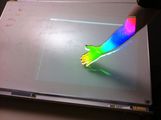
Hand

Farbverlauf

Farbverlauf
Farbverlauf

PR2






Auf den ersten beiden Bildern wird alles gefärbt, was sich vor der Wand befindet. Beim Farbverlauf wurde die Entfernung zur Wand auf eine Farbskala übertragen und jeder Punkt mit seiner entsprechenden Farbe angestrahlt. Für das letzte Bild hat einer unserer Roboter (ein PR2 von Willow Garage) Model gestanden. Hier hängt die Farbe vom Abstand zum Fußboden ab.
Für die technische Umsetzung (Kalibrierung, Gestenerkennung) gibt's noch eine eigene Seite: GPN12:KinectTech
Wer wird gesucht?
- Alle, die sich für Bildverarbeitung interessieren und wissen wollen, was man alles mit einer Kamera anstellen kann. (für die Diskussion der technischen Dateils: GPN12:KinectTech) - Alle, die sich gerne künstlerisch austoben wollen, Ideen für ein Spiel oder eine Installation haben - Alle, die mal eine Demo ausprobieren wollen um sie danach in den höchsten Tönen zu loben - Alle, die sich mit Processing, OpenFrameworks und ähnlichen Techniken auskennen - Alle anderen, die gerne mal mit der Kinect spielen wollen
Der Code soll natürlich openSource sein und möglichst einfach zu benutzen sein (wenig Abhängigkeiten, möglichst auch unter Windows), damit er nicht nach der GPN einfach verschwindet.
Ich würde mich sehr freuen, wenn sich ein paar Leute zum Hacken und Spielen finden würden :)
--Nikolas 21:47, 8. Apr. 2012 (CEST)